Biography
I am a Robotics Engineering PhD Student in the Soft Robotics Lab at Worcester Polytechnic Institute (WPI). Naturally inquisitive about far too many things, my interests span a wide variety of applications of robotics and control systems engineering, including space exploration, assistive technology, and human-robot interaction, but they are all united by the common thread of modeling robot movement and locomotion. Thus far, my research has focused on exploring how to achieve more efficient, animal-like motions with robots, specifically through the modeling and control of an origami-inspired continuum spine that is impeded in our lab’s quadruped robot and lizard-inspired robot.
- Space Technology and Robotics
- Biologically-Inspired Locomotion
- Dynamic Modeling and Controls
- Soft Robotics
- Human-Robot Interaction
- Assistive Technology and Wearable Devices
PhD in Robotics Engineering, Expected - 2026
Worcester Polytechnic Institute
M.S. in Robotics Engineering, 2023
Worcester Polytechnic Institute
B.S. in Mechanical Engineering, Physics Minor, 2021
Lafayette College
Research and Professional Experience
I have continued working under Dr. Cagdas Onal in the Soft Robotics Lab at WPI.
As a researcher, my projects include:
- Investigating dynamic models for the continuum spine in order to accurately predict and control the robots’ behavior
- Designing and building new versions of our origami-inspired continuum actuators to improve operation speed and manufacturing
- Developing simulation of origami actuator in Webots
As a lab coordinator, my responsibilities include:
- Organizing and running weekly meetings
- Managing lab space
- Sending out announcements
- Coordinating and hosting tours of the lab
I worked under Dr. Cagdas Onal in the Soft Robotics Lab at WPI. While a NSF Graduate Research Fellow, I was involved with the following projects:
- Lizard Team: Collaborated with a team of graduate students to investigate methods of enabling a soft lizard-inspired continuum-spined wheeled robot to traverse uneven terrain, including executing mechanical design updates to improve functionality and incorporate sensors for SLAM
- Quadruped Team: Collaborated with another graduate student to develop a soft quadruped robot with a flexible spine. Responsible for deriving inverse kinematics, developing a Webots simulation, and assisting with mechanical design
- Origami-Inspired Continuum Actuator - Modeling: Investigated dynamic models for the continuum spine in order to accurately predict and control the robots’ behavior
- Wearable Assistive Device: Designed a wearable device to assist those with hearing loss
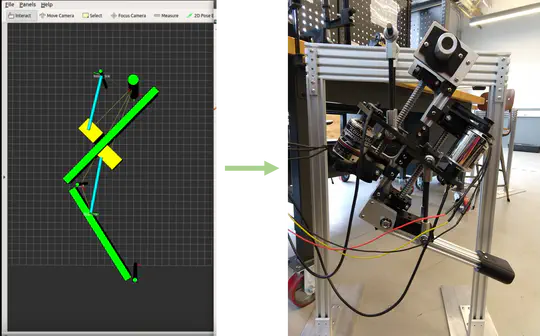
- Worked with the LANDO team for a second summer on the Lightweight Surface Manipulation System (LSMS), a robotic crane for surface operations on the Moon or Mars
- Developed dynamic model of and began controller design for an underactuated double pendulum mounted at the end of a robot arm as an analogy for controlling a payload’s oscillations at the end of the LSMS
- Designed, manufactured, and assembled the double pendulum system to be mounted on a UR3 robot
- Worked with the LANDO team on the Lightweight Surface Manipulation System (LSMS), a robotic crane for surface operations on the Moon or Mars
- Drafted a literature review comparing the LSMS to existing robotic cranes and investigating empirical dynamic modeling and system identification techniques to support simulation and controller design
- Developed Python/MATLAB scripts for deriving serial arm dynamic and energy equations
- Supported hardware development
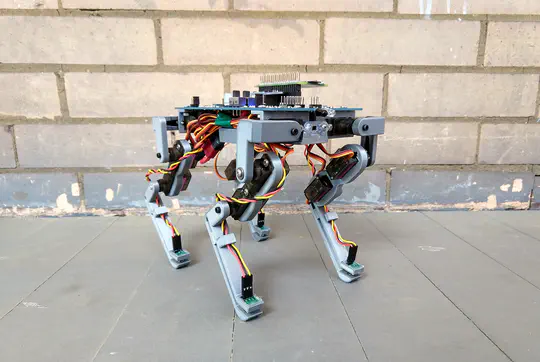
- Constructed an improved version of the low-cost quadruped robot developed during the Excel summer research program, achieving a total cost of approximately $160
- Characterized IR sensors and custom force sensors
- Developed basic autonomous navigation to avoid obstacles using IR sensors
- Developed a simulation environment in Webots for rapid software development and testing
- Investigated dynamic balancing by implementing a novel method of recovering from disturbances in Python, which involved leaning against small side loads and side-stepping to recover from larger impacts
- Constructed a low-cost quadruped robot in preparation for senior thesis project
- Designed printed circuit boards, 3D-printed components, and force sensors for each foot
- Developed software in Python and Arduino to implement active compliance and walking mechanisms
- Developed a quadruped robot based on the open-source project openDog by James Bruton with another student and mechanical engineering professor
- Wrote Python scripts using ROS to develop walking mechanisms that laid the groundwork for the 2019-2020 Lafayette OpenDog Senior Design Team
- Modified and designed various components of the hip and leg systems
Teaching and Mentoring
Working as teaching assistant (TA) for RBE 501: Robot Dynamics. Responsibilities include:
- Holding office hours to answer student questions
- Grading assignments
- Mentoring a team of undergraduate students working on a flexible-spined hexapod robot for their senior capstone project
- Guiding students by helping them define the scope of their projects, meeting with them weekly to ensure they were on schedule and to answer questions, and aiding with documentation
- Assisted them in writing and submitting a conference paper to the IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025)
- Mentored two teams of undergraduate students (one team each year) working on a continuum mobile robot for pipe inspection for their senior capstone projects
- Guided students by helping them define the scope of their projects, meeting with them weekly to ensure they were on schedule and to answer questions, and aiding with documentation
- Provided one-on-one tutoring for students in PHYS 111: General Physics – Mechanics and Thermodynamics, PHYS 131: Physics I – Mechanics, PHYS 133: Physics II – Electricity, Magnetism, and Waves, ES 226: Statics, and ME 240: Dynamic
- Completed CRLA Level 1 Tutor Certification by participating in regular training sessions
- Led and prepared material for group sessions to reinforce concepts and applications of course content, including review worksheets in preparation for exams
- Held drop-in sessions to work individually with students
- Successfully transitioned from in-person to online sessions in compliance with Lafayette’s shift to remote learning in March 2020 due to the pandemic.
Projects

Contact
Have more questions about my work? Feel free to contact me using one of the options below!