Lafayette OpenDog
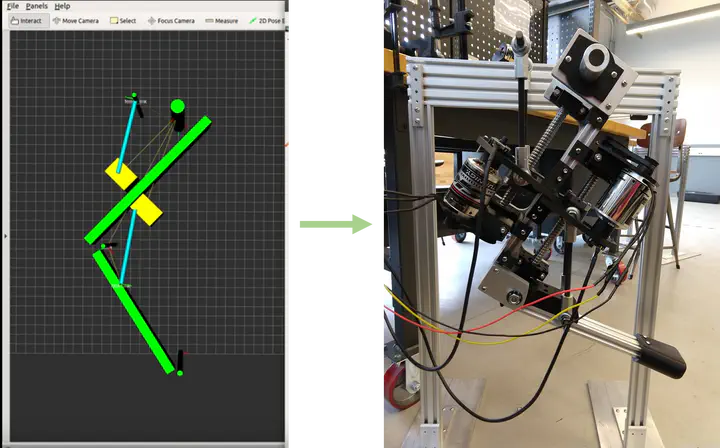 Translating rviz model to the physical model
Translating rviz model to the physical modelFor me, this is where it all began. Inspired by James Bruton’s openDog, I collaborated with Professor Alexander Brown and Sanha Lee ‘20 during the summer of 2019 to begin the development of a large-scale quadruped robot. My resposibilities included investigating the literature to inform our hardware and software design, deriving the inverse kinematics model for the robot, developing Python scripts using ROS to interface with the motor controllers, implementing a simple walking mechanism on a single leg (as demonstrated below), and aiding my partner in some of the mechanical design and assembly.

Take a look at our GitHub repository, opendog_ros.
Sanha and the Lafayette OpenDog Senior Design Team continued this project over the 2019-2020 school year. To see their continued progress, check out the README file on opendog_ros for details about their repositories.
Gabrielle G. Conard
PhD Student in Robotics Engineering
Robotics Engineering PhD student passionate about designing robots from top to bottom with experience in mechatronics and PCB design, classical and modern control theory, dynamics modeling, and bridging the gap between simulations and physical robots. Particular interests include space technology, assistive technology, and human-robot interaction.