MicroDog - A Low-Cost Quadruped Robot
 MicroDog - A Low-Cost Quadruped Robot
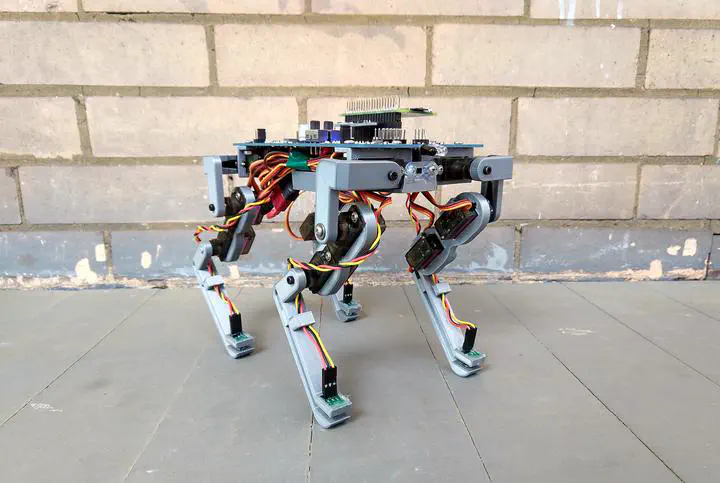
MicroDog - A Low-Cost Quadruped RobotStarting as an independent study in the spring of my junior year (2020), this project morphed into my senior thesis titled “Stepping Up: Investigating Dynamic Stability in a Low-Cost Quadruped Robot.” After noting a lack of inexpensive quadruped platforms that could be used by both researchers and robotics students, Professor Brown and I developed several iterations of a roughly $150 quadruped robot to meet this need. Standing at about 6 inches tall, this platform consists of twelve RC servos, a 7.4V battery pack for untethered walking, and several 3D-printed components. In addition, I designed the custom printed circuit board that serves as the robot’s chassis, which features an integrated ATmega32u4, a Raspberry Pi Zero, a few IR sensors, an IMU, and a number of power and communication breakout pins and mounting holes to make this an expandable platform.
On the software side, I focused primarily on developing a simplistic walking gait and implementing active compliance in the legs of MicroDog during my independent study. To do this, we designed compressible feet, each fitted with a Hall effect sensor to measure the amount that the foot was compressed. The “spring constant” of the foot was experimentally derived, allowing us to determine the force being applied to the bottom of the foot.

Using springs again as a model for joint compliance, we could tune how much the foot position compensated in response to an applied force.

For more details about my independent study, see my final report.
This work set the foundation for my thesis project. My original goals are presented in my thesis proposal paper and presentation. During the Fall 2020 semester, I developed improved walking gaits, such as the example in the video below, and experimented with obstacle avoidance using IR sensors by having the robot avoid the edge of a table.

After designing and constructing a fourth iteration of the robot to address some electrical issues, I spent the rest of the spring semester investigating methods of implementing disturbance recovery from a side load using the force sensors in the feet.
This work has received some press coverage as well, first by IEEE in a fun article describing how roboticists have been working from home and again by Lafayette News.
This work culminated in a final thesis report and defense presentation. While I have passed my thesis defense and the project is “finished”, there is so much more that can be done with this platform. I hope to publish a paper in the near future about the work I have done on it thus far, and hopefully, future students at Lafayette can continue exploring what this robot can do, like stair climbing or uneven terrain navigation.
Gabrielle G. Conard
PhD Student in Robotics Engineering
Robotics Engineering PhD student passionate about designing robots from top to bottom with experience in mechatronics and PCB design, classical and modern control theory, dynamics modeling, and bridging the gap between simulations and physical robots. Particular interests include space technology, assistive technology, and human-robot interaction.